Inner Circle
Welcome to the official Baraja blog where you will be the first to hear about our progress, product developments and stay up to date on our breakthrough technology.
Join Baraja's Inner Circle
Latest from Baraja
November 29, 2023
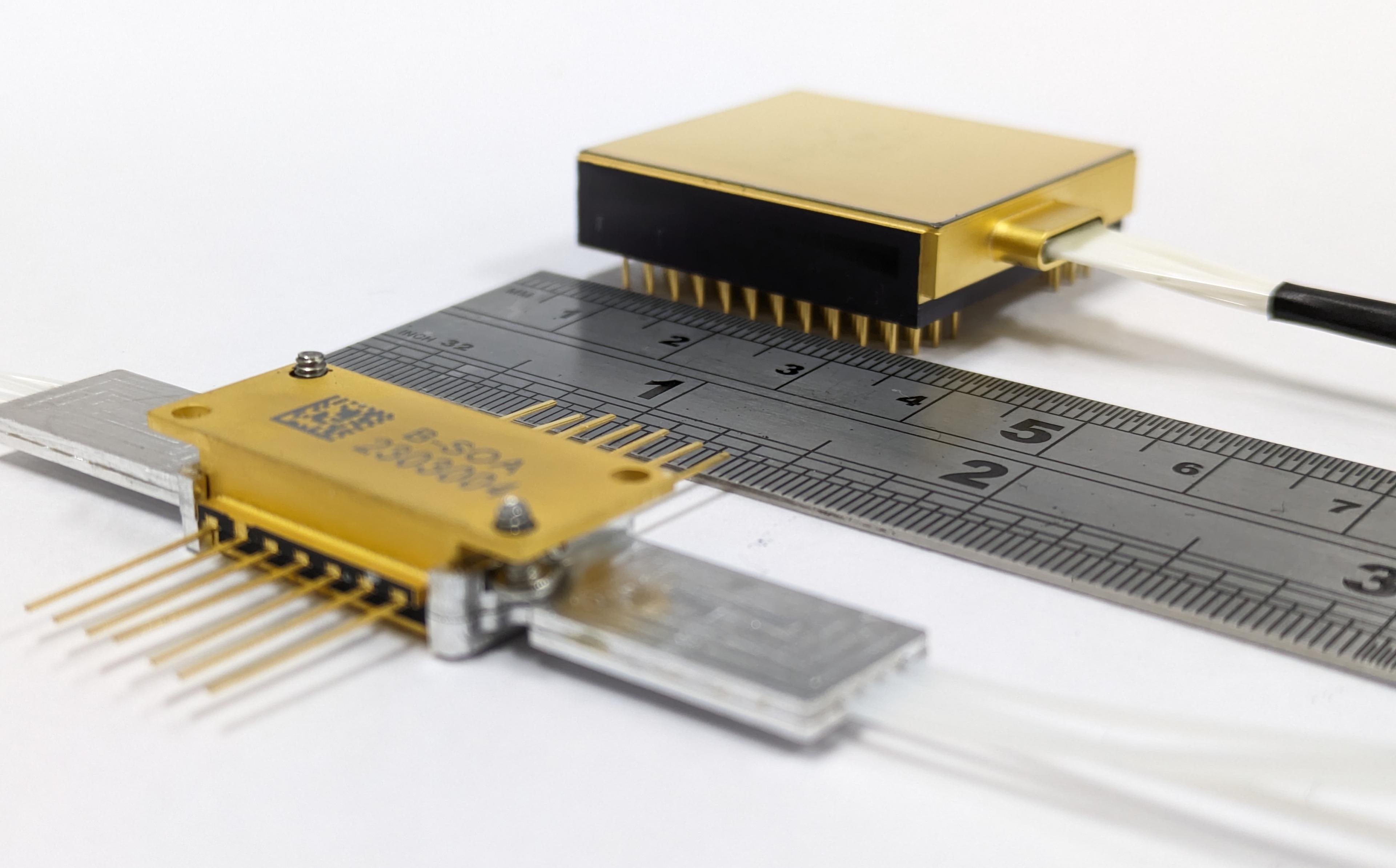
Which chip are they talking about? The power of integration: new-to-world Doppler RMCW Spectrum-Scan™ LiDAR
Federico Collarte
More articles

January 5, 2023
Press Release: Baraja and TIER IV strengthen collaboration with signing of memorandum of understanding ahead of CES 2023 exhibit
The Baraja Team
Baraja, creator of the breakthrough Spectrum-Scan™ LiDAR technology, is expanding upon its work with TIER IV, an open-source autonomous driving leader, by signing a memorandum of understanding (MOU) to jointly validate, develop and optimize their respective autonomous driving solutions.
Learn more

January 3, 2023
Press Release: Baraja receives investment from Veoneer on the heels of the advanced development agreement with global automotive OEM
The Baraja Team
Veoneer's investment is a clear signal from leading OEMs and industry players that Spectrum HD25 continues to make strong progress toward commercialization.
Learn more

December 15, 2022
Baraja’s 2022 year in review
The Baraja Team
As 2022 comes to an end, we’re taking a moment to reflect on all the major events and milestones we’ve experienced throughout the year.
Learn more

December 5, 2022
Can Per Point Doppler Empower a More Intelligent LiDAR Driving Solution?
Evelyn Foster (Systems Engineer) and Cibby Pulikkaseril (Founder & CTO)
Doppler improves the performance of both the segmentation and tracking processes that make up the perception layer of an Autonomous Vehicle (AV).
Learn more
Join the Baraja Inner Circle
Subscribe to receive the latest from Baraja