Light detection and ranging (LiDAR) sensors are a fundamental sensing modality for self-driving vehicles and provide essential information about the environment for decision-making. The light reflected from an object provides distance information that builds up a 3D map of the sensor's surroundings - but what if you could detect other properties of the objects in view?
Positional information is not the only thing that we consider when driving. A parked car on the side of the road is just an obstacle in the surroundings while a moving car requires monitoring for turn signals or braking. Likewise, a pedestrian running towards the vehicle warrants more attention than someone stopped on the footpath. Intuitively then, we can assume that providing velocity measurements to the vehicle decision center would enhance the performance of self-driving vehicles.
How does it work?
Per point velocity measurements can be made by measuring the Doppler effect on transmitted points. Just like the changing pitch of a siren as an ambulance drives past you on the street, the frequency of the LiDAR’s transmitted light is altered by the relative radial speed of the object that it hits. This then requires the LiDAR to be sensitive to the frequency, and not just the time of flight of the returned signal.
Why is Doppler useful?
Doppler improves the performance of both the segmentation and tracking processes that make up the perception layer of an Autonomous Vehicle (AV). During segmentation, Doppler information can help to separate moving objects from stationary surroundings. With positional information only, pedestrians standing next to larger buildings or other objects can be mistakenly clustered together with the object. However, with the Doppler information, the dynamic and static points can be filtered and clustered separately. This both allows for better segmentation of smaller objects and improves simultaneous localization and mapping (SLAM) as only the stationary objects need to be considered for mapping. With per point Doppler, segmentation is also improved at long range where scan lines become further apart, yielding fewer points on a target and therefore reduced information about the object shape.
Building a clearer picture
Over several frames, the moving object tracking process is also improved by the inclusion of velocity information. An object’s position in subsequent frames can be estimated using the position and velocity information provided, which can then be compared to the detected position. Once matched, a more detailed pointcloud of the object can be shown using the aggregation of multiple frames. What may have been first detected as an unidentified object could be more confidently classified after a few frames, thus extending the usable range of the LiDAR.
The instantaneous velocity data provided can also provide information on vehicle or pedestrian intent. Consider the case of highway driving where an object is detected at distance directly in front of the sensor. Depending on the velocity, the response and urgency of an AV is varied. If the object is rapidly accelerating, as in the case of a recent merge, there is no immediate action necessary, perhaps a slight reduction in speed to maintain a safe distance. In contrast, if the object is rapidly decelerating, the AV needs to respond to match and avoid a collision. Finally, if the object is stationary, the vehicle will need to take immediate action to come to a safe stop or move around the obstacle. The difference in reaction time from having this velocity information available instantaneously rather than calculating from positional information over several frames is significant at highway speeds.
How sensitive does it need to be?
Doppler has the potential to be a powerful tool to help solve autonomous driving challenges but the requirements for this technology are high. We can check this with some light mathematics, the change in optical frequency, Δf, from a target moving at Δv is given by
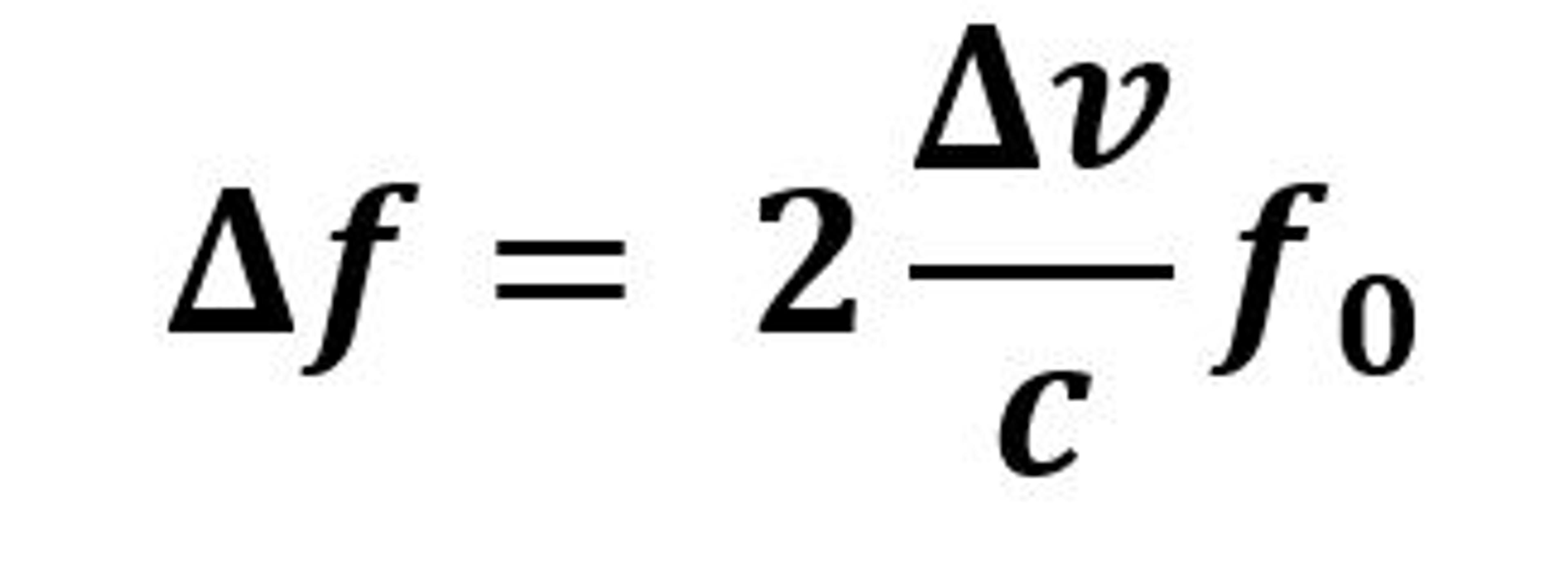
Where 𝒇𝟎 is the optical frequency of the transmitted laser radiation (in Hz), and c is the speed of light (m/s).
Our Baraja Spectrum-Scan™ LiDAR uses a laser that is, on average, at 1550nm, which roughly corresponds to an optical frequency of 193.4 THz. What Doppler shift might we expect?
Well, if we’re travelling at highway speeds (140 km/h) and a car is in the opposite direction at 140 km/h, that’s a relative speed of 280 km/h. This results in a Doppler shift of about 100 MHz.
At the other extreme, we’d like to detect a pedestrian moving next to a stationary object. A pedestrian moves at perhaps 3-4 km/h, which would result in a minimum Doppler shift of 1.3 MHz.
Thus, in order to provide useful Doppler information, we need to design our electronic detection system to handle small and large shifts.
Ultimately, per point velocity data improves the performance of key perception functions and simplifies the processing required to make key decisions on a self-driving vehicle, making Doppler LiDAR an invaluable addition to the sensor suite.