The photo above is the accumulated pointcloud taken by our Baraja Spectrum-Scan™ LiDAR as our field engineers drove across the Golden Gate Bridge on a bright San Francisco afternoon. We post-processed the pointcloud data to stitch all the frames together as the van drove across, and the end result is a super crystal-clear 3D rendition of this incredible USA landmark.
LiDAR is considered the primary sensor for full autonomy as it gives a true measure of distance (as compared to image sensors) and has the angular resolution needed to faithfully identify objects in the environment (as compared to radar). While not without its own limitations, LiDAR is the preferred sensor for the majority of autonomy teams around the world.
How does LiDAR achieve superior angular resolution compared to radar?
This is simply due to the wavelength of light. Light oscillates on a very fine scale, on the order of micrometers while radar oscillates on larger scales, on the order of millimeters to centimeters.
This can be expressed mathematically by looking at the beam width of a radar antenna pattern in angle space which is given by
where λ is the wavelength of the radar beam, and D is the diameter of the antenna. The beam from a 77 GHz radar with a 5 cm antenna has an angular width over 5 meaning it propagates in free space over a 5 degree extent in the field of view.
Why is beam angular width important? Very small objects can easily be masked by the presence of large or reflective object in the path of the beam - a key failure point of a 3D sensor that you want to trust.
Conversely, for LiDAR, we can apply some simple modelling to how our beams propagate in the environment and treat them as Gaussian beams. In reality, many LIDAR systems have beams that are much more erratic than a simple Gaussian beam, but at Baraja, we have optimized our optical system to have the cleanest, most precise beams possible, so the Gaussian beam approximation is a valid one.
Gaussian beams have an angular spread, in radians, expressed by:
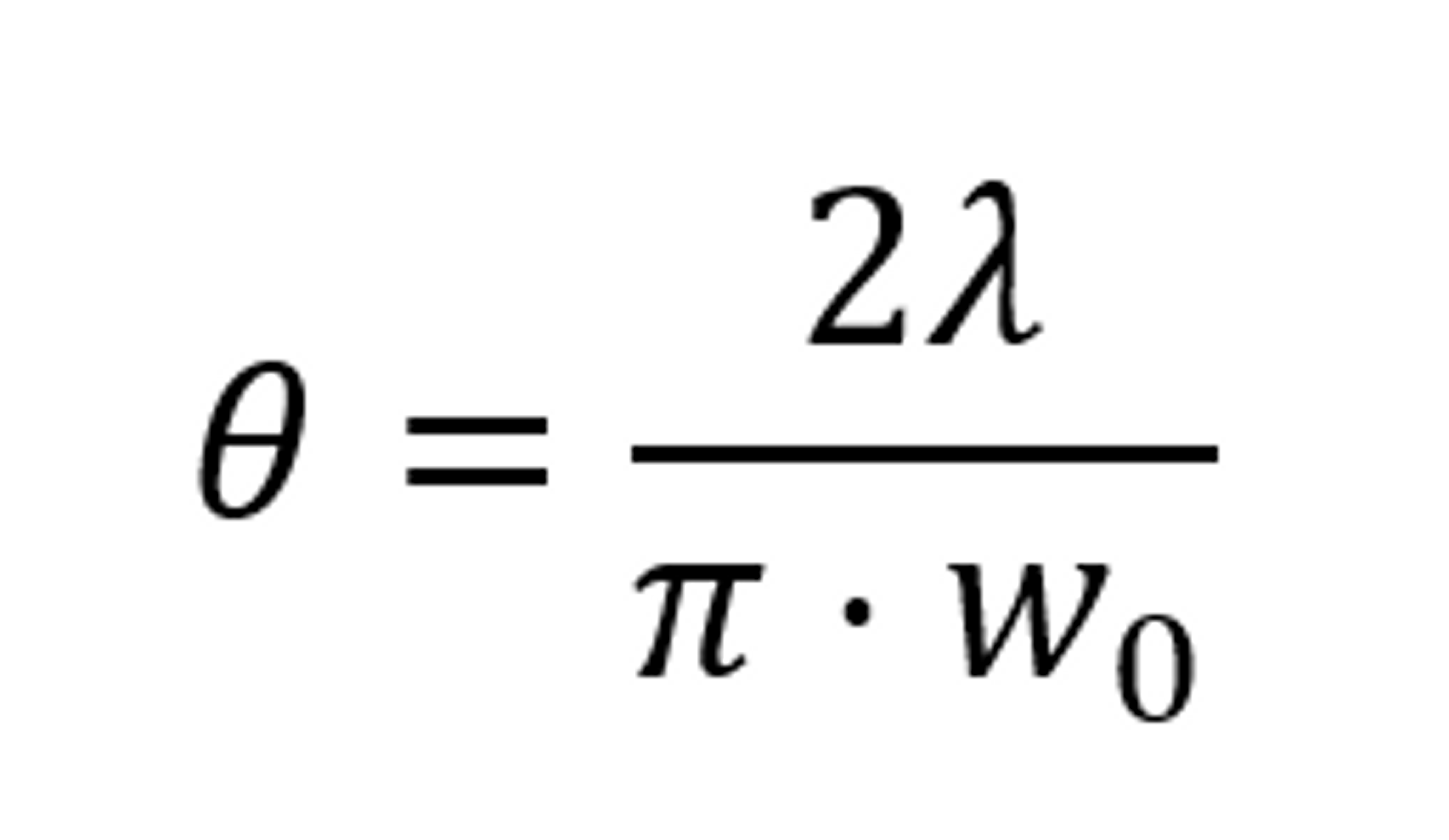
where λ is the wavelength of the laser used in the LiDAR, and is the beam waist, the width of the beam at its narrowest point.
If we use a beam waist of 1 cm and a wavelength of 1550nm, the beam divergence is only 0.0056
This explains the high angular resolution achievable by our LiDAR, and why we achieve such impressive pointclouds when coupled with long effective range and resolution.
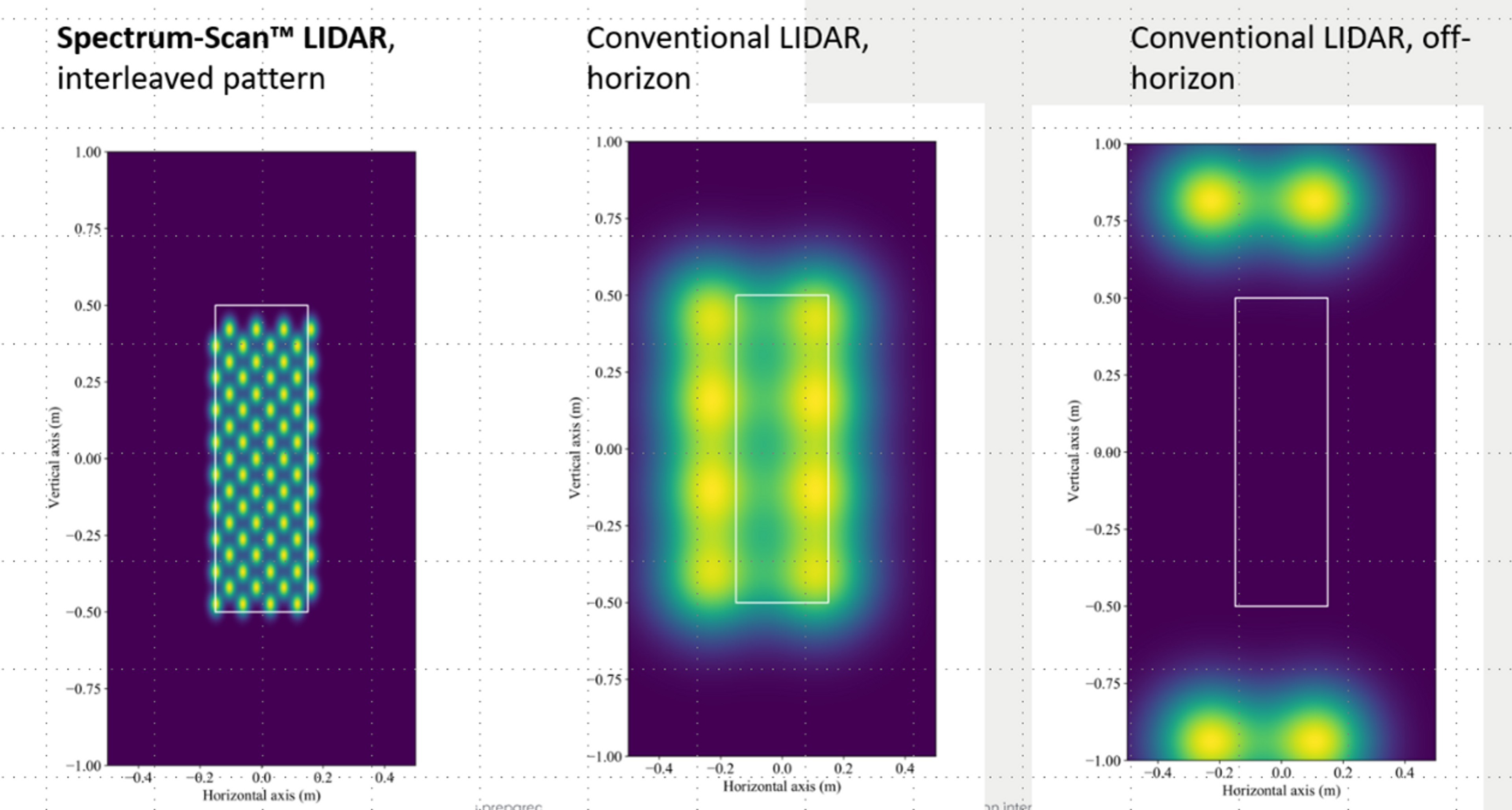
However, not all LiDARs are created equal. At Baraja, we work hard to design our optics to ensure the largest , or beam waist, so that we can minimize the beam divergence. In the picture below, the calculated beam size at 100m from a typical Baraja LiDAR, is 0.02 degree divergence (see figure on the left). Comparing this to legacy LiDARs, which usually do not offer optimal beam divergence, the simulated beam has 0.13 degree divergence!
On a child sized object at 100m, our Spectrum-Scan™ LiDAR offers really tight, accurate beam placement - compared to conventional LiDAR which has large beams, and can also have large gaps between beams, as shown below.
This is becoming a more salient point for the industry, as researchers are finding that beam divergence of LiDAR systems can lead to errors in estimating the size and extent of a small object or completely the missing the object. For example, Long and Morris show that beam divergence leads to an error in estimating pole widths, suggesting that narrower beam divergence can lead to accurate estimates of objects in the environment (Long and Morris, "Lidar Essential Beam Model for Accurate Width Estimation of Thin Poles," 2020 IEEE Intl. Conf. Intelligent Robots and Systems, 2020).
Clearly, the impact is shown in this accumulated point cloud of the Golden Gate Bridge. It is composed of many narrow structures, such as poles and cables, and a LiDAR with poor beam divergence and inaccurate beam placement would struggle to demonstrate the rendition of fine details. In contrast, the Baraja Spectrum-Scan™ LiDAR shows every detail with remarkable clarity.
Baraja
Clearer. Safer. Brighter.