LiDAR is more than just numbers on a spec sheet. Detecting small objects at long-range (~200m+) is one of LiDAR’s most critical attributes, especially for those building autonomous vehicles.
Understanding your LiDAR’s ‘effective range’ can be the difference between your perception stack identifying a small object far away, or failing to receive that information altogether. In other words, if you have a delayed detection of an object, it can either lead to a collision or a very uncomfortable breaking event for your passenger.
We’ve found that sensitivity is often the most discussed element of a LiDAR’s detection range but it’s not the only limiting factor in detecting small objects far away.
To help you make a better decision, in this post we’ll look at:
- Sensitivity
- Resolution
- Beam Divergence
- Accuracy and Precision
We’ll also look at how true effective range is the combination of all these properties. If one element is lacking, your pointcloud quality will diminish. If the likelihood of detecting an object is reduced, then the effective range is reduced and the vehicle will need to travel at slower speeds to stay safe, which isn’t suitable for consumer vehicles out in the real world.
It’s only when all these properties work together that you’ll be able to detect small objects out at range with high confidence.
Let’s have a look at the separate components.
Sensitivity
This is a measure of how little light a sensor requires to get a positive detection. To detect low reflectivity objects out at long-range, the system must be able to pick up the very low power signal returned from the object. Sensitivity is typically measured from a ‘pixel filling target’, meaning the target used is equal to or bigger than the beam size of the sensor. This ensures that all the light from the transmit beam is hitting the target. Sensitivity is a fundamental property of LiDAR, but it is often used as the only metric to determine how far a system can detect an object which is not the whole picture.
Resolution
In the same way you need many pixels from a camera to get sharp image quality to identify small objects in the image, to achieve good pointcloud quality you must have very fine increments in the sensor’s sampling location. You need as many points on a target as possible to determine whether something is there or not and for a perception stack to determine what that object is. High-resolution is fundamental to detecting small objects at range. If the light from the LiDAR fails to hit a small object and there is insufficient resolution, it’s very easy for that object to ‘slip through the cracks’ and be missed. High-resolution ensures the sensor is getting enough points on a target for the perception algorithm to confidently detect it as an object of interest.
Beam Divergence
This is a slightly more nuanced concept but is important to understand when evaluating a LiDAR’s effective range. Beam divergence quantifies how the light from the sensor expands in size over distance. The larger the beam divergence, the more rapidly the beam size will expand over distance and the larger the beam size will be at long-range.
If a beam has low divergence, it is said to be well collimated. By design, the light from the Baraja Spectrum-Scan™ sensor has excellent collimation, resulting in a very small beam size of 8cm (H) x 18cm(V) at 200m.
This is critical as it contributes to effective range in three important ways.
- If you have a well collimated beam at long range, the vast majority of objects will be larger than the laser beam area. This significantly reduces the likelihood of getting a partial hit. A partial hit is when only part of the beam hits an object, in turn reducing the probability of detecting that return. The sensor should maintain ‘pixel filling target sensitivity’ for much smaller objects. If you have high-resolution but a large beam size at range, you will end up sampling the same location multiple times.
- Having high-resolution and small beam size at range means each sample location is in an entirely unique location in space. This enables the sensor to keep the object’s unique ‘per pixel’ detail, such as the reflectivity and position. High quality data allows algorithms to correctly identify and classify objects in the scene.
- Small beams at range protect against ‘blooming’. Blooming occurs when only part of the beam hits an object and records a positive detection. This results in a blurry image and objects will often look bigger than they actually are. Having smaller beams means there is a much lower chance of this happening because the light is localised to the measurement’s location.
Accuracy and Precision
Accuracy measures how closely the LiDAR matches the real world. If the sensor is inaccurate – where either the angular accuracy is off or the distance accuracy is off – then the LiDAR is not giving the perception stack useful information. A large part of detection for perception comes from sensor fusion, where multiple different sensor types are combined together to get a positive detection of an object, i.e. camera, radar, LiDAR all working together. But if the LiDAR isn’t accurate, it won’t line up with the rest of the sensors, reducing the perception’s ability to make a positive detection.
Precision is similar. It’s a measurement of how close to where the system thinks the light is going as it comes out of the LiDAR relative to where the actual position of the light is. Since no system can measure the exact position of their scanner perfectly, there is always going to be an error here. But if accuracy and precision are off, this will once again result in a blurry image making it difficult to have high confidence in the data being returned. This makes detecting small objects even harder.
Can’t have one without the other
Understanding a LiDAR’s effective range is to understand that all these properties must work together. We often have customers querying only about sensitivity, and we believe they are missing the powerful combination of Sensitivity, Resolution, Beam Divergence, and Accuracy and Precision.
Let’s run through some of the problems you might face if you don’t gather all these components.
Let’s assume you have enough sensitivity to detect objects out at long-range, but don’t have a high enough resolution. Without resolution, there’s a high chance you’ll miss small objects altogether or there isn’t enough information transmitted back to your perception algorithm to detect it as an object. Systems typically need multiple points to confidently call something an object.
If there’s enough resolution but poor beam size, you will a) lose sensitivity on small objects, making them harder to detect in the first place, and b) receive a blurry image due to oversampling and partial beam hits.
Even if you have sensitivity and high-resolution but the precision of your scanner is poor, you’ll once again end up with a blurry pointcloud which makes it harder to have confidence in points at long-range.
High-resolution means the sensor has the ability to give new information for the perception stack to make an assessment whether an object is there or not. If the beams are overlapping significantly, which happens when you have high-resolution but poor beam divergence, then then there is less information about the environment passed to the system. You’re essentially sampling the same location in space.
In order for your perception stack to reliably detect small objects at long-range, a LiDAR system needs all of these things.
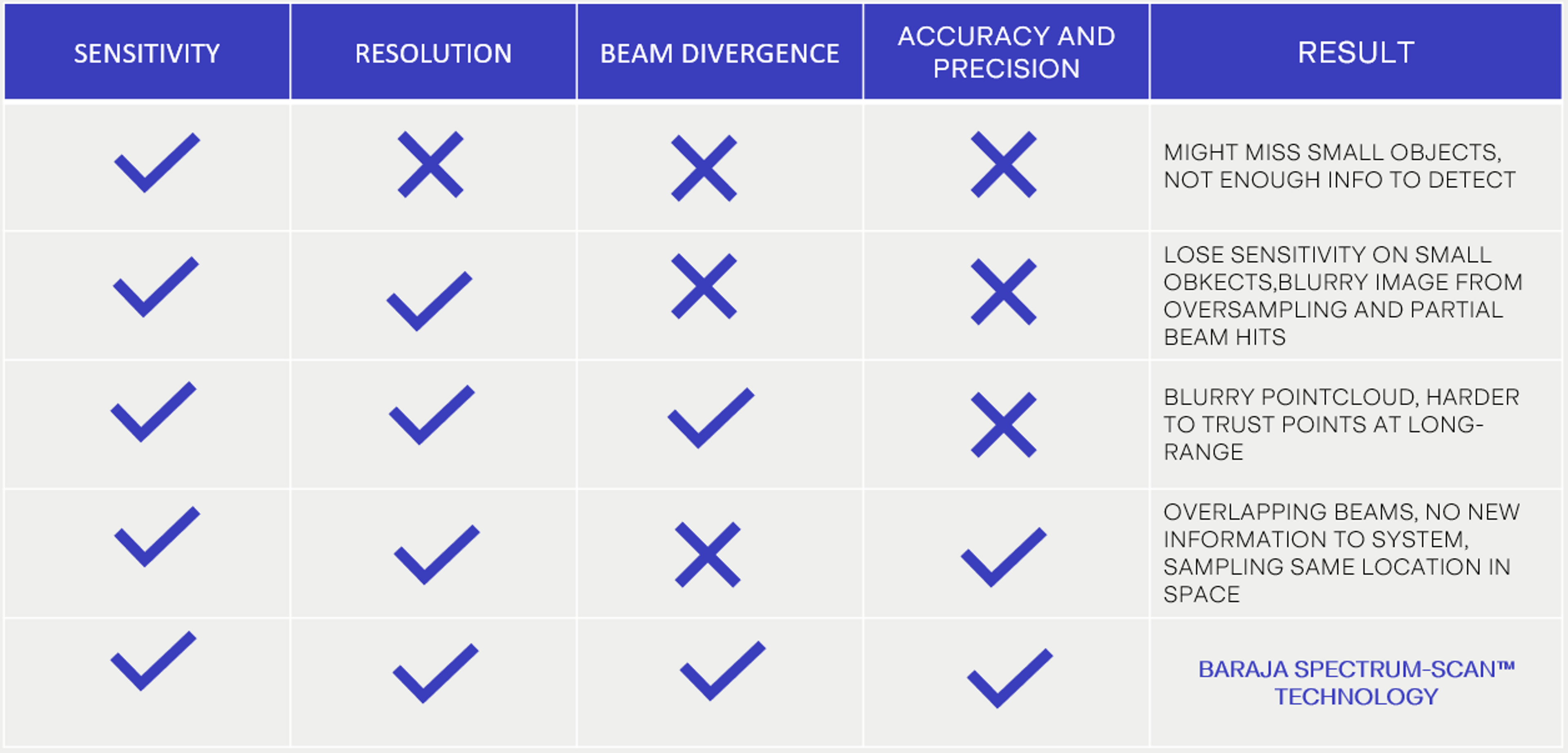
Baraja Spectrum-Scan™ technology has all these attributes. Our fundamental belief comes from analysing pointcloud data and collaborating with our customers. It’s why we focus so intently on maximising effective range.
Our Spectrum-Scan™ LiDARs possess superior attributes in all the critical areas and enable a much better effective range than other LiDAR.
Sensitivity: 250m+ on a 10% Lambertian target.
Resolution: Achievable vertical resolution of 0.025°. Achievable horizontal resolution of 0.05°.
Beam Divergence: 0.015˚(H) 0.027˚(V) (divergence half-angle), this is industry leading and ensures excellent beam size of 8cm(H) x 18cm(V) at 200m.
Accuracy and Precision: the Baraja Spectrum-Scan™ sensor is extremely precise. The tuning accuracy of the laser and the ability to select from over 2,000 unique frequencies enables the Baraja Spectrum-Scan’s™ LiDAR’s extreme precision. We have complete control over where the light is going at any given time.
If you’re working on a project that requires a powerful LiDAR that detects small objects at long-range get in touch with us.